Rotational Symmetry Field Design on Surfaces
Palacios, Zhang — ACM Trans. Graph. 26(3), Article 55 (2007)
Explained assuming: you know tangent fields, singularities, and vector fields on surfaces at a working
level. No deep learning — this is a vector/tensor-field design paper. The new idea here (a
representation that makes N-way symmetric directions behave like ordinary vectors) is explained from
scratch below.
The problem: N-RoSy fields aren't vectors, so you can't just add them
An N-way rotational symmetry (N-RoSy) generalizes the familiar cross field (a set of
4 perpendicular tangent directions, used to guide quad-dominant remeshing) to any N: a set of N
directions, evenly spaced by 360°/N, invariant to rotation by that amount. N=1 is an
ordinary vector field; N=2 is a line field (think: eigenvectors of a symmetric matrix, e.g. principal
curvature directions, which have no inherent "forward" direction); N=4 is the cross field itself;
N=6 shows up in triangular/hex-like patterns.
The trouble: unlike ordinary vectors, N-RoSy "directions" are actually sets of N equivalent directions, and there's no consistent way to add two of them. Pick either representative member vector of two N=2 line fields and sum them, and you can get contradictory answers depending on which member you happened to pick — summation isn't even well-defined. Without a coherent notion of addition (and scalar multiplication), you can't borrow any of the standard machinery — interpolation, basis-field superposition, smoothing energies — that vector field design already has, which is exactly the machinery needed to give a user explicit topological control.
The fix: a representation vector, not a member vector
The paper's core trick: instead of representing an N-RoSy by picking one of its N equivalent member directions (angle θ), represent it by the single complex/2D vector at angle Nθ — raising the angle by a factor of N mechanically removes the directional ambiguity, since all N member angles (θ, θ+360°/N, θ+720°/N, …) collapse to the exact same value once multiplied by N and reduced mod 360°. This "representation vector" is not itself one of the physical directions — it's a bookkeeping device — but crucially, sums and scalar multiples of representation vectors are now coherent and well-defined, which is all that's needed to reuse vector-field design algorithms wholesale: build an N-RoSy field the same way you'd design a vector field, then convert representation vectors back to physical N-way directions only at the end.
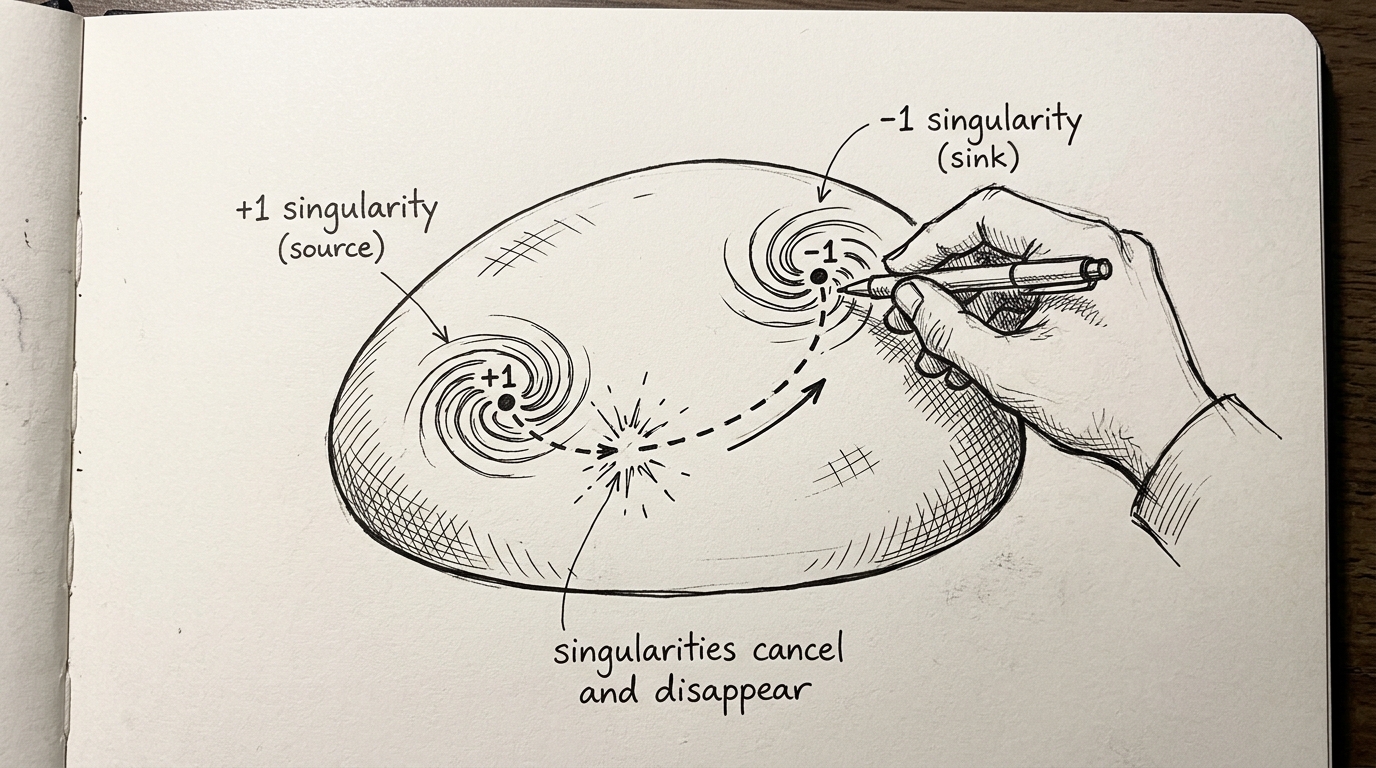
Explicit topological control, not just smoothing
With representation vectors in hand, the paper builds fields the same way classic singular vector field design works: start from a superposition of local basis fields, each one contributing exactly one singularity of a chosen index at a chosen location (an artist places these directly), then relax the combined field to make it as smooth as possible everywhere else — while guaranteeing the placed singularities stay exactly where they were put, since relaxation only smooths the field between constraints, not through them. Existing operations from vector-field design carry over directly: cancelling a pair of opposite-index singularities against each other, or sliding a singularity to a more natural location (e.g. a shoulder or joint, rather than in the middle of a smooth panel), all become well-defined operations on the N-RoSy field via its representation-vector form.